
Light detection and ranging (lidar) can be used to accurately estimate forest structure attributes using the rich three-dimensional (3D) information within the lidar point clouds,and has been proven to be highly useful for forest inventory practices. Currently, airborne, unmanned aerial vehicle (UAV)-borne, mobile, and terrestrial lidar systems are the most commonly used lidar platforms in forest-related applications.
However, each of these lidar platforms has its own limitations. The down-looking airborne and UAV-borne lidar data can provide highly accurate tree canopy information, but lack tree trunk information; mobile lidar systems (e.g., backpack lidar) can provide detailed tree trunk information, but the limited vertical field of view and measurement range may result in the miss of upper canopy information; single-location scans of terrestrial laser scanning (TLS) suffer from the occlusion effect of branches and leaves, and the registration of multi-scan lidar data can be highly time-consuming. The fusion of multi-platform lidar data has the potential to provide an ultimate solution to address the limitations of each lidar platform. However, due to the complexity and irregularity of the forest environment, there is a lack of robust geometric features in the forest for automatic registration of multi-source lidar data. How to register multi-source lidar data automatically in a forest environment remains to be a challenge.
Recently, the research group led by Professor Qinghua Guo from the Institute of Botany, Chinese Academy of Sciences (IBCAS), proposed a novel marker-free method and achieved high-accuracy automatic registration of multi-scan TLS data in forest environments. Its main principle is to identify shaded areas from the raw point cloud of a single TLS scan and use them as the key features to register multi-scan TLS data. The proposed method greatly improves the efficiency of TLS data acquisition in forest environments and has been effectively validated in coniferous forests, coniferous and broad-leaved mixed forests, and rainforests. Moreover, based on the assumption that each forest stand has a unique spatial distribution of trees, the research group also successfully achieved the automatic fusion of airborne and terrestrial lidar data by using tree locations as the key registration features. These works effectively overcome the limitation of single lidar platforms, and lays the foundation for efficient, dynamic, and accurate forest inventory.
These studies have been published in ISPRS Journal of Photogrammetry and Remote Sensing and IEEE Transactions on Geoscience and Remote Sensing, recently. They were supported by the Frontier Science Key Programs of the Chinese Academy of Sciences and National Natural Science Foundation of China.
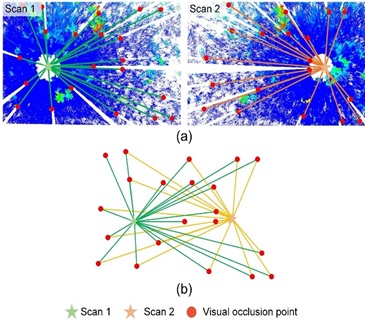
Schematic diagram of the proposed multi-scan terrestrial laser scanning (TLS) registration method (By IBCAS).
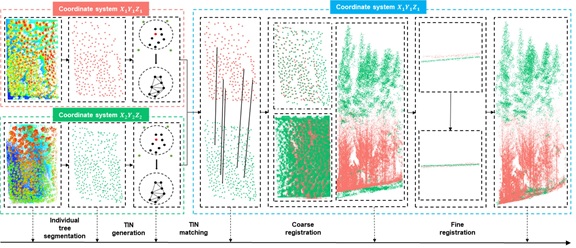
The process of the proposed multi-platform lidar registration method (By IBCAS).
Article link: https://doi.org/10.1016/j.isprsjprs.2020.06.002;
https://ieeexplore.ieee.org/abstract/document/8930045/
Contact: Email:qguo@ibcas.ac.cn
Institute of Botany, Chinese Academy of Sciences
Light detection and ranging (lidar) can be used to accurately estimate forest structure attributes using the rich three-dimensional (3D) information within the lidar point clouds,and has been proven to be highly useful for forest inventory practices. Currently, airborne, unmanned aerial vehicle (UAV)-borne, mobile, and terrestrial lidar systems are the most commonly used lidar platforms in forest-related applications.
However, each of these lidar platforms has its own limitations. The down-looking airborne and UAV-borne lidar data can provide highly accurate tree canopy information, but lack tree trunk information; mobile lidar systems (e.g., backpack lidar) can provide detailed tree trunk information, but the limited vertical field of view and measurement range may result in the miss of upper canopy information; single-location scans of terrestrial laser scanning (TLS) suffer from the occlusion effect of branches and leaves, and the registration of multi-scan lidar data can be highly time-consuming. The fusion of multi-platform lidar data has the potential to provide an ultimate solution to address the limitations of each lidar platform. However, due to the complexity and irregularity of the forest environment, there is a lack of robust geometric features in the forest for automatic registration of multi-source lidar data. How to register multi-source lidar data automatically in a forest environment remains to be a challenge.
Recently, the research group led by Professor Qinghua Guo from the Institute of Botany, Chinese Academy of Sciences (IBCAS), proposed a novel marker-free method and achieved high-accuracy automatic registration of multi-scan TLS data in forest environments. Its main principle is to identify shaded areas from the raw point cloud of a single TLS scan and use them as the key features to register multi-scan TLS data. The proposed method greatly improves the efficiency of TLS data acquisition in forest environments and has been effectively validated in coniferous forests, coniferous and broad-leaved mixed forests, and rainforests. Moreover, based on the assumption that each forest stand has a unique spatial distribution of trees, the research group also successfully achieved the automatic fusion of airborne and terrestrial lidar data by using tree locations as the key registration features. These works effectively overcome the limitation of single lidar platforms, and lays the foundation for efficient, dynamic, and accurate forest inventory.
These studies have been published in ISPRS Journal of Photogrammetry and Remote Sensing and IEEE Transactions on Geoscience and Remote Sensing, recently. They were supported by the Frontier Science Key Programs of the Chinese Academy of Sciences and National Natural Science Foundation of China.
Schematic diagram of the proposed multi-scan terrestrial laser scanning (TLS) registration method (By IBCAS).
The process of the proposed multi-platform lidar registration method (By IBCAS).
Article link: https://doi.org/10.1016/j.isprsjprs.2020.06.002;
https://ieeexplore.ieee.org/abstract/document/8930045/
Contact: Email:qguo@ibcas.ac.cn
Institute of Botany, Chinese Academy of Sciences